Главная > ПАК Геовидео > Аппаратная часть > Программная часть > Расчётная часть > Техническая часть > Комплектация
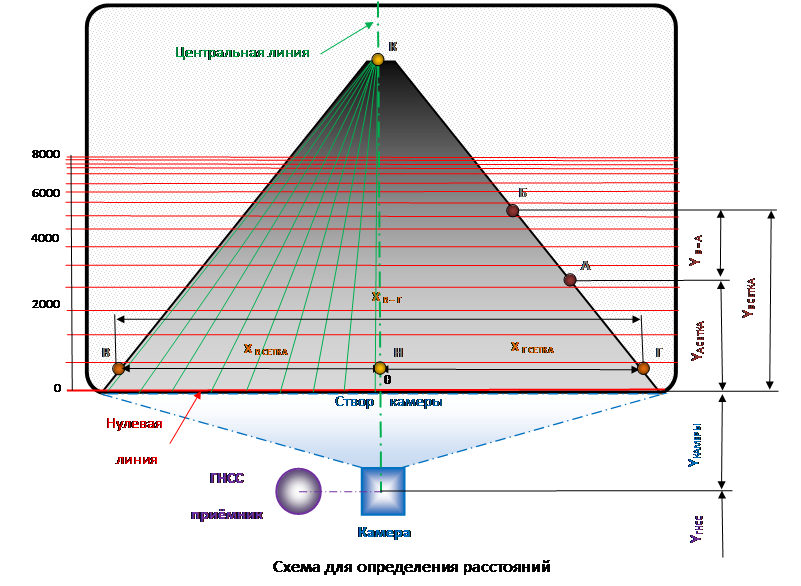
1. ПОГРЕШНОСТЬ АППАРАТНОЙ ЧАСТИ ПАК: 1.1. Р ГНСС – погрешность измерений ГНСС-приемника: Точность съемки ГНСС-приемника влияет на расстояние YГНСС (см. схему для определения расстояний). Технология производства измерений с использованием ГНСС, заключается в вычислении абсолютных координат без накопления ошибок измерений. Т.о. погрешность измерений назначается по кратности значения YГНСС (единицы, десятки или сотни километров). Погрешность относительного измерения величины YГНСС составляет:
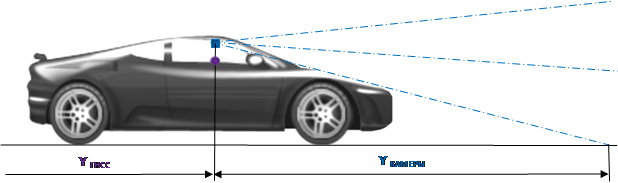
1.2. Р КАМЕРЫ – погрешность камеры - Р КАМЕРЫ-Т – погрешность установки камеры по тангажу Тангаж – угловые движения камеры относительно горизонтальной оси. Погрешность установки камеры по тангажу влияет на продольное расстояние YКАМЕРЫ и изменяется в пределах:
- Р КАМЕРЫ-Р – погрешность установки камеры по рысканью Рысканье – угловые движения камеры относительно вертикальной оси. Погрешность установки камеры по рысканью зависит от фокусного расстояния объектива – чем меньше фокусное расстояние, тем большие искажения образуются по краям изображения. Кроме того, на погрешность влияет расстояние от центральной линии изображения – чем меньше удаление от линии, чем выше точность. Точность установки камеры по рысканью влияет на погрешность поперечных измерений. Погрешность установки камеры по рысканью, учитывается коэффициентом K КАМ-Р = 0,95 – 0,99. - Р КАМЕРЫ-К – погрешность установки камеры по крену Погрешность установки камер по крену, учитывается коэффициентом К КАМ-К = 0,98 – 0,99. 2. ПОГРЕШНОСТЬ ПРОГРАММНОЙ ЧАСТИ ПАК: 2.1. Р ПС – Погрешность измерений пространственной сетки программы Pviewer: - Р ПС-ПР – погрешность пространственной сетки в продольном направлении Погрешность измерения в продольном направлении зависит от расстояния от нулевой линии до объекта, а так же от удаления продольной линии пространственной сетки, по которой производится измерение, от центральной линии изображения.
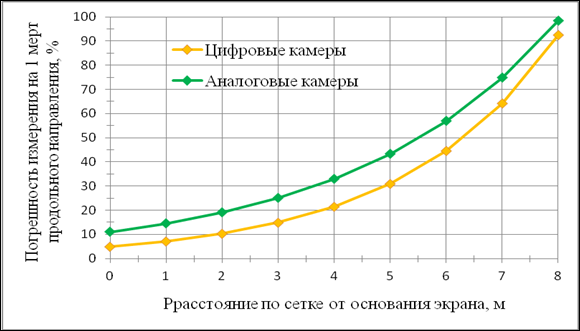
Для цифровых камер
Для аналоговых камер
С целью получения достоверных данных, измерения в продольном направлении целесообразно производить на расстоянии, не превышающем 2 м от нулевой линии. - Р ПС-ПОП – погрешность пространственной сетки в поперечном направлении Погрешность измерения в поперечном направлении зависит от удаления поперечной линии пространственной сетки, по которой производится измерение, от нулевой линии.
Измерения в поперечном направлении производятся строго у основания экрана по нулевой линии, где погрешность минимальна. Следовательно, погрешность измерений не превышает значения:
2.2. Р ИО – погрешность инженерной обработки Погрешность измерений, выполняемых инженерной группой при камеральной обработке дорожных данных, учитывается коэффициентом субъективности K СУБ = 0,96. 1. ДОРОГА: - относительное местоположение дороги Относительное местоположение дороги «Н (начало дороги) – К (конец дороги)» характеризуется линейной привязкой точек «Н» и «К»: YН = Y Н ГНСС + Y КАМЕРЫ + Y Н СЕТКА YК = Y К ГНСС + Y КАМЕРЫ + Y К СЕТКА Точность определения относительного местоположения дороги характеризуется суммой следующих погрешностей: YН = (Y Н ГНСС ±Р ГНСС) + (Y КАМЕРЫ ±Р КАМЕРЫ-Т*K КАМ-Р*К КАМ-К) + (Y Н СЕТКА ±Р ПС-ПР*K СУБ) YК = (Y К ГНСС ±Р ГНСС) + (Y КАМЕРЫ ±Р КАМЕРЫ-Т*K КАМ-Р*К КАМ-К) + (Y Б СЕТКА ±Р ПС-ПР*K СУБ) Значение Р ГНСС зависимости от кратности значения YГНСС.
- протяженность дороги Протяженность дороги «Н (начало дороги) – К (конец дороги)» определяется разницей линейных привязок точек «К» и «Н»: Y К – Н = Y К ГНСС – Y Н ГНСС + (Y К СЕТКА – Y Н СЕТКА) Точность определения протяженности объекта характеризуется суммой следующих погрешностей: YК – Н = ((Y К ГНСС – Y Н ГНСС) ±Р ГНСС) + ((Y К СЕТКА – Y Н СЕТКА) ±Р ПС-ПР*K СУБ) Значение Р ГНСС зависимости от кратности значения YГНСС. YК – Н (YГНСС кратно 1 00 км)
- ширина дороги Ширина дороги «В (начало) – Г (конец)» определяется суммой расстояний от центральной линии изображения до начала и конца объекта: Х В – Г = Х В СЕТКА + Х Г СЕТКА Точность определения ширины дороги характеризуется суммой следующих погрешностей: Х В – Г = (Х В СЕТКА + Х Г СЕТКА) ±Р ПС-ПОП*K СУБ Х В – Г
2. ДОРОЖНЫЕ ОБЪЕКТЫ - относительное местоположение точечного объекта Относительное местоположение точечного объекта «А» или «Б» характеризуется линейной привязкой относительно начала дороги «Н»: YА(Б) = Y А(Б) ГНСС + Y КАМЕРЫ + Y А(Б) СЕТКА Точность определения относительного местоположения точечного объекта характеризуется суммой следующих погрешностей: YА(Б) = (Y А(Б) ГНСС ±Р ГНСС) + (Y КАМЕРЫ ±Р КАМЕРЫ-Т*K КАМ-Р*К КАМ-К) + (Y А(Б) СЕТКА ±Р ПС-ПР*K СУБ) Значение Р ГНСС зависимости от кратности значения YГНСС. YА (Б) (YГНСС кратно 1 00 км)
- относительное местоположение линейного объекта Относительное местоположение линейного объекта «А (начало) – Б (конец)» характеризуется линейной привязкой точек «А» и «Б» относительно начала дороги «Н»: YА = Y А ГНСС + Y КАМЕРЫ + Y А СЕТКА YБ = Y Б ГНСС + Y КАМЕРЫ + Y Б СЕТКА Точность определения местоположения начала и конца линейного объекта характеризуется суммой следующих погрешностей: YА = (Y А ГНСС ±Р ГНСС) + (Y КАМЕРЫ ±Р КАМЕРЫ-Т*K КАМ-Р*К КАМ-К) + (Y А СЕТКА ±Р ПС-ПР*K СУБ) YБ = (Y Б ГНСС ±Р ГНСС) + (Y КАМЕРЫ ±Р КАМЕРЫ-Т*K КАМ-Р*К КАМ-К) + (Y Б СЕТКА ±Р ПС-ПР*K СУБ) Значение Р ГНСС зависимости от кратности значения YГНСС. YА (Б) (YГНСС кратно 1 00 км)
- протяженность объекта Протяженность линейного объекта «А (начало) – Б (конец)» определяется разницей линейных привязок конца и начала объекта: Y А – Б = Y Б СЕТКА – Y А СЕТКА Точность определения протяженности объекта характеризуется суммой следующих погрешностей: YА – Б = (Y А СЕТКА – Y Б СЕТКА) ±Р ПС-ПР*K СУБ YА – Б
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||